Dynamic Positioning System
Dynamic Positioning System
Dynamic Positioning (DP) is a vessel capability provided via an integration of a variety of individual systems and functions. A computer control
system automatically maintains a vessel's position and heading by using her own propellers and thrusters. The main components of any DP
system are the positioning system, the DP computer and the thrusters. The positioning system, usually a GPS, monitors the position of the
vessel. When the vessel moves off the intended position, the DP computer will calculate the required thrust which will then be applied by the
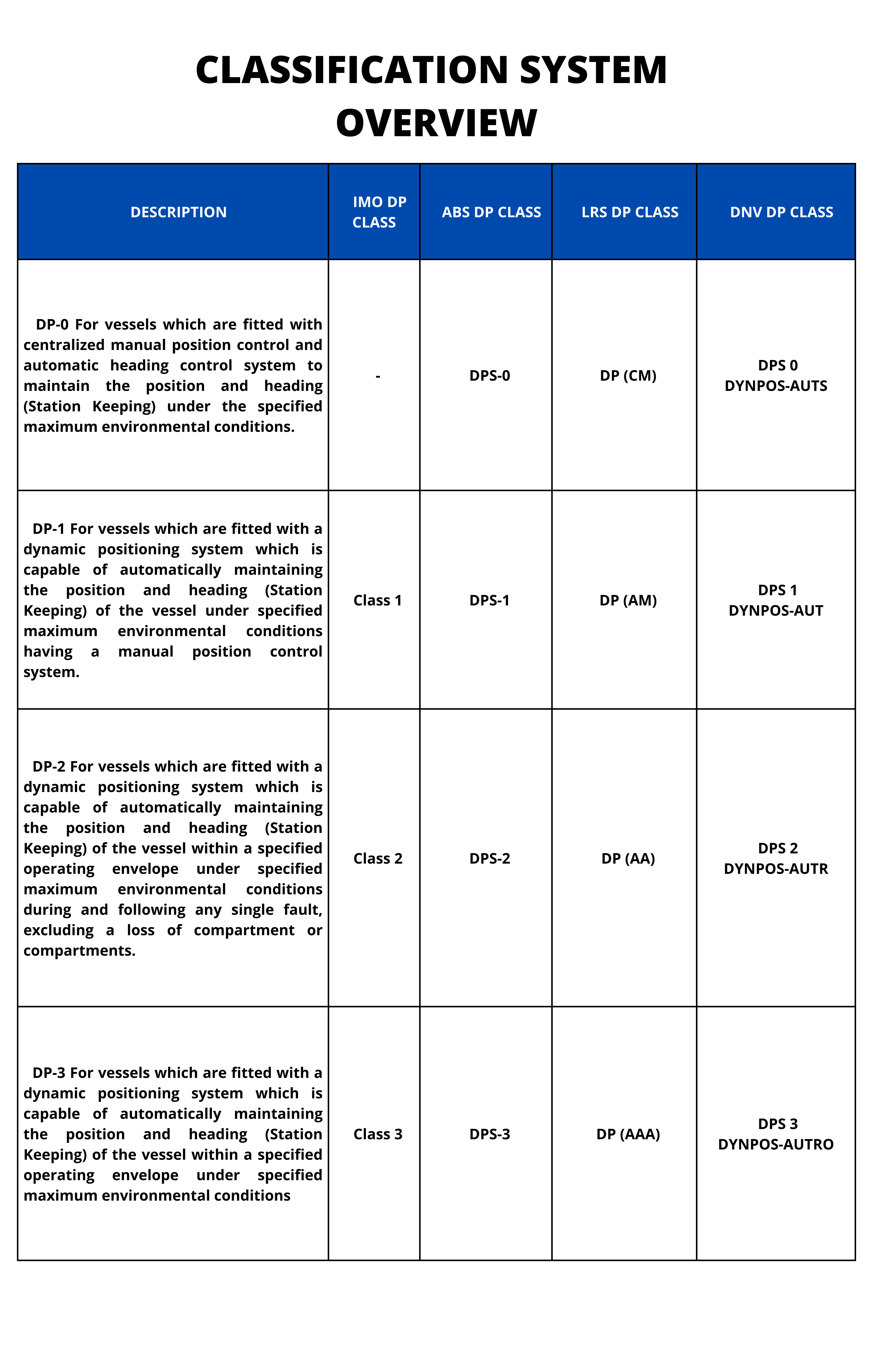
thrusters in order to maintain the position of the vessel. KDU Group delivers full scope for any DP Conversion of non-DP Vessel to DP3, including
upgradation of Switchboard with PMS, Thruster Control System, Alarm Monitoring System and Position Reference System.
BASIC FORCES AND MOTIONS:
A seagoing vessel is subjected to forces from wind, waves and current as well as from forces generated by the propulsion system. The vessel's response to these forces, i.e., its changes in position, heading and speed, is measured by the position-reference systems, the gyrocompass and the vertical reference sensors. Reference systems readings are corrected for roll and pitch using readings from the vertical reference sensors. Wind speed and direction are measured by the wind sensors. The DP control system calculates the forces that the thrusters must produce in order to control the vessel's motion in three degrees of freedom – surge, sway and yaw – in the horizontal plane.
KDU work scope includes:
- Gap Analysis Study of the vessel Electrical and Propulsion systems to meet the DP 3 notation
- Design of vessels electrical & control systems as per DP 3 Requirements
- Documentation, revised load analysis for Class review
- Supply & Installation of the DP 3 System with All reference sensors
- Supply of new redundant LV Switchboards in two separate ECRs
- Supply of redundant Power Management System for two ECRs
- Supply of new redundant Alarm Monitoring System for two Separate ECR
- Supply of new redundant Alarm Monitoring System for two Separate ECR
- Design of the Fire Detection System
- Retrofit of the propulsion controls for thruster interface with DP System
- Re-commissioning of all power and propulsion machinery
- Thermal imaging of power systems on completion
- Test and trials
- FMEA Trials
DP SYSTEM APPLICATIONS:
- Cable-laying
- Crane vessels
- Cruise ships
- Diving support vessels
- Dredging
- Drill ships
- Floating production storage and offloading units (FPSOs)
- Flotels
- Landing platform docks
- Maritime research
- Mine sweepers
- Pipe-laying ship
- Platform supply vessels
- Rock dumping
- Sea Launch
- Sea-based X-band radar
- Shuttle tankers